Consignes
La note ne valide pas seulement le résultat de votre programme, mais également son style :
- choix approprié des noms de variables,
- présence de documentation pour les fonctions importantes,
- commentaires pertinents (la paraphrase de code, par exemple:
y = x * 2 # y est le double de xn'apporte rien), - découpage des fonctions / procédures complexes en sous-fonctions / sous-procédures lorsque nécessaire...
Vérifiez ces points avant de demander à votre intervenant de valider votre code.
Liens utiles
- la page du langage Python
- la page de la documentation de la librairie standard de Python
- un livre d'apprentissage de la programmation en Python (en français) (lien direct (pdf))
- page de rendu TPLab
- email des enseignants
Vous aurez également besoin du fichier boulet.py.
Objectifs du TP
Le but de ce TP est de revoir certains concepts vu au premier semestre (boucles, conditionnelles, fonctions) en insistant sur la qualité du code écrit. Pour ceci, il faudra suivre les règles vues en cours concernant :
- architecture du fichier source :
- bibliothèques (import),
- fonctions (et variables globale),
- fonction principale exécutée ;
- obligation de documenter les fonctions écrites (docstrings de Python) ;
- choix appropriés pour les noms des variables et arguments des fonctions ;
- présence de commentaires pertinents (caractère
#de Python), - ...
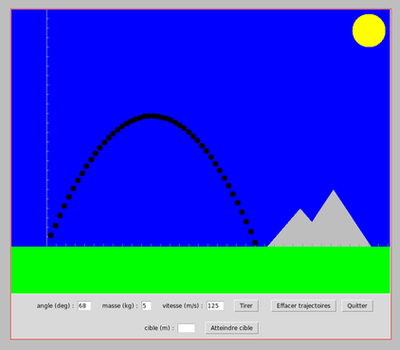
Après quelques exercices préliminaires, nous allons modéliser (et dessiner) la trajectoire d'un boulet de canon en fonction de l'angle de tir, de la vitesse initiale du boulet et de sa masse. Nous chercherons ensuite à ajuster automatiquement l'angle de tir pour essayer d'atteindre une cible précise.
 |
1. Préliminaires : recherche dichotomique
Le principe de la recherche dichotomique (Wikipedia) est de chercher une solution d'un problème en coupant l'ensemble des solutions possible en deux parties égales à chaque étape. Au bout d'un moment, soit la solution est trouvée, soit l'ensemble devient vide et il n'y a pas de solution.
Par exemple, pour trouver un nombre entre 0 et 100 par questions oui/non successives, les stratégies suivantes ne sont pas très efficaces :
- on pose les questions
- Est-ce que le nombre est 0 ?
- Est-ce que le nombre est 1 ?
- Est-ce que le nombre est 2 ?
- Est-ce que le nombre est 3 ?
- ...
- on cherche les unités et les dizaines séparément en posant les questions :
- Est-ce que le chiffre des dizaines est 0 ?
- Est-ce que le chiffre des dizaines est 1 ?
- Est-ce que le chiffre des dizaines est 2 ?
- ... puis celui des unités en posant :
- Est-ce que le chiffre des unités est 0 ?
- Est-ce que le chiffre des unités est 1 ?
- Est-ce que le chiffre des unités est 2 ?
- ...
La strategie optimale est de séparer l'ensemble des nombre en 2 parties égales (ou presque) à chaque question. On peut poser par exemple :
- Est-ce que le nombre est compris entre 0 et 50 ?
- Suivant que la réponse est oui ou non, on posera ensuite la question
- Est-ce que le nombre est compris entre 0 et 25 ?
- ou Est-ce que le nombre est compris entre 51 et 75 ?
- etc.
Si on représente les questions sur un dessin, on a :
 |
Avec cette stratégie, il ne faudra jamais plus de 7 questions pour arriver à trouver le nombre !
Le principe est le suivant : pour chercher un nombre entre a et b, on demande s'il est entre a et m, où m est la moyenne de a et b. Si la réponse est oui, on recommence à chercher entre a et m, et si la réponse est non, on recommence à chercher entre m+1 et b.
La procédure suivante implante la stratégie qui pioche des nombres au hasard jusqu'à tomber sur le nombre choisi par l'utilisateur :
from random import randint def strategie_naive(): """implémentation de la stratégie naïve qui cherche un nombre entre 0 et 100 choisi par l'utilisateur.""" print("Pensez à un nombre entre 0 et 100 puis appuyez sur 'Enter'...") input() nombre = -1 # nombre cherché. Il passera à une valeur positive # quand on l'aura trouvé nb_questions = 0 while nombre < 0: nb = randint(0,100) # on demande si le nombre est égal à nb : question = "Est-ce que le nombre est égal à " + str(nb) + " ? [o/n] " reponse = "" while reponse not in ["o", "n"]: reponse = input(question) if reponse == "o": print("oui !") nombre = nb elif reponse == "n": print("non...") nb_questions = nb_questions+1 print("Le nombre choisi est égal à", nombre, "et il a fallu", nb_questions, "questions pour le trouver")
Lisez ce programme pour comprendre comment il fonctionne, puis écrivez une procédure sur le même modèle qui implémente la recherche dichotomique...
Combien de questions sont nécessaires pour trouver un nombre entre 1 et 100 ? Entre 1 et 1000 ? Entre 1 et 10000 ?
2. Le boulet de canon...
2.1. Modélisation de la trajectoire
La trajectoire d'un objet inerte est régie par les lois de la mécanique. Nous allons utiliser une approximation de ces lois pour modéliser de manière discrète la trajectoire d'un boulet de canon.
À un instant t donné, le boulet a
- une position avec des coordonnées
xety, - une vitesse (vecteur) avec des coordonnées
vxetvy
et il est soumis à la force d'attraction terrestre. Au temps t + dt, la position et la vitesse du boulet sont modifiées en utilisant les valeurs précédentes :
x = x + vx * dt,y = y + vy * dt,vx = vx, autrement dit, la valeurvxne change pas (car on néglige les frottements),vy = vy - m * G * dt, oùmest la masse du boulet etGest la constante gravitationnelle de la terre (9.81).
Attention : dans ces formules, la différence de temps dt est exprimé en secondes.
 |
Pour que la modélisation ressemble à la réalité physique, il faut que dt soit assez petit.
Écrivez une fonction "trajectoire_boulet" qui prend en argument les valeurs suivantes :
angle: l'angle du canon, en degrés, par rapport à l'horizontalmasse: la masse, en kilogramme, du boulet de canon (5kg est une valeur pertinente)vitesse: la vitesse, en mètre/s, du boulet à la sortie du canon (125 m/s est une valeur pertinente).dt: l'intervalle de temps pour les calculs successifs, en centièmes de secondes. Si cette valeur n'est pas fournie, votre fonction utilisera la valeur1par défaut.freq: la fréquence des affichages. En effet, si l'on dessine le boulet trop souvent, on ne pourra pas voir les positions successives du boulet. Une valeur de ce paramètre de 50 n'affichera donc qu'une position sur 50. Si cette valeur n'est pas donnée, votre fonction utilisera la valeur10par défaut.
La valeur de retour de la fonction est la distance parcourue par le boulet avant qu'il touche le sol. (Il s'agit donc de la dernière valeur de x.)
Votre fonction devra afficher (en utilisant la procédure dessine_boulet(x,y)) le boulet aux positions intermédiaires appropriées (argument freq).
Vous devez écrire votre fonction dans le fichier à trous suivant : boulet.py.
- Le fichier fourni comporte une ligne
Vous pouvez donc utiliser les fonctions sinus et cosinus, ainsi que la constante π. Attention, les fonctions trigonométriques de Python utilisent des angles en radians, alors que votre fonction utilise un angle en degrés...
from math import sin,cos,pi
- Pour tester votre fonction, il suffit de lancer Python sur le fichier (menu
"Run" -> "Run Module F5") et d'utiliser la petite interface.
2.2. Recherche dichotomique de l'angle pour atteindre une cible
Nous cherchons maintenant à atteindre une cible, avec une précision de 1 mètre. Pour ceci, il faudra tirer des boulets (avec la fonction trajectoire_boulet) et modifier l'angle en fonction de la distance parcourue par le boulet : on commence par tirer un boulet à 45° pour obtenir la distance maximale que l'on peut atteindre.
- Si cette distance n'est pas suffisante, on s'arrête...
- Sinon, on fait une recherche dichotomique pour chercher une valeur d'angle appropriée entre 45° et 90°.
Écrivez la fonction dichotomie, qui prend en argument :
cible: la distance entre le canon et la cible, en mètres,masse,vitesse,dtetfreqavec la même interprétation que dans la question précédente.
Votre fonction appellera la fonction précédente trajectoire pour calculer et afficher les trajectoires du boulet.
- Commencez par essayer de « en cloche » en choisissant des angles entre 45° et 90°. Une fois que vous y arrivez, essayer de tirer « ras le sol » en choisissant des angles entre 0° et 45°.
- Juste pour s'amuser, vous pouvez téléchargez le fichier images.py et le mettre dans le même répertoire que votre fichier
boulet.py. Ça ne change rien, mais les tests sont plus interessants...


